Code
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as mplimport numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as mplplt.rcParams['figure.figsize']=(4,4)Sei \(f:\mathbb{R} \rightarrow \mathbb{R}^2\) die Kurve \(f(t)= \begin{pmatrix} x(t) \\ y(t) \end{pmatrix} = \sqrt{t}\begin{pmatrix} \cos(\pi t) \\ \sin(\pi t) \end{pmatrix}\)
quiver Geschwindigkeitsvektoren in Ihren Plot ein. Tipp: Verwenden Sie die scale-Option.Gegeben ist die Kurve \(\begin{pmatrix} x(t) \\ y(t) \end{pmatrix} = \begin{pmatrix} \sin(2t) \\ \cos(3t) \end{pmatrix}\).
Gegeben ist das Skalarfeld \(\phi(x,y,z)=10 x^2 y^3 - 5 xyz^2\).
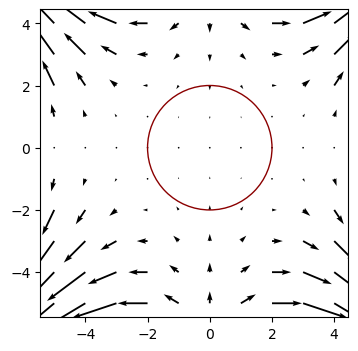
Gegeben ist das Vektorfeld \(\mathbf{F}=\begin{pmatrix} xy^2 \\ x^2y-4y \end{pmatrix}\).
t = np.linspace(0.01, 2)
x = np.sqrt(t)*np.cos(np.pi*t)
y = np.sqrt(t)*np.sin(np.pi*t)
xp = 0.5/np.sqrt(t)*np.cos(np.pi*t) - np.pi*np.sqrt(t)*np.sin(np.pi*t)
yp = 0.5/np.sqrt(t)*np.sin(np.pi*t) + np.pi*np.sqrt(t)*np.cos(np.pi*t)
plt.figure()
plt.plot(x, y, 'r')
plt.quiver(x, y, xp, yp, scale_units='xy', scale= 3)
plt.xlabel('x')
plt.ylabel('y')
plt.xlim(-2, 2)
plt.ylim(-2, 2)
plt.grid(True)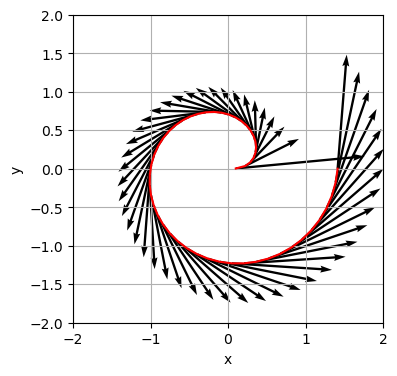
r = np.sqrt(t)
phi = np.pi*t
rp = 0.5/np.sqrt(t)
phip = np.pi*np.ones(r.shape)plt.figure()
plt.plot(r, phi, 'r')
plt.quiver(r, phi, rp, phip, scale_units='xy', scale= 4)
plt.xlabel('r')
plt.ylabel('phi')
plt.xlim(0, 8)
plt.ylim(0, 8)
plt.grid(True)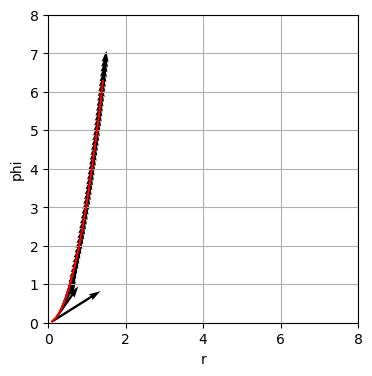
t = np.linspace(-3, 3, 500)
x = np.sin(2*t)
y = np.cos(3*t)
plt.figure()
plt.plot(x, y,'--r')
plt.xlabel('x')
plt.ylabel('y')
plt.grid(True)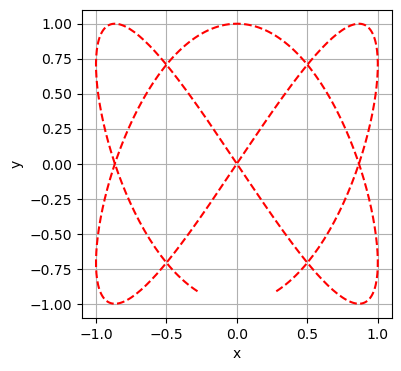
\(\nabla \phi=\begin{pmatrix} \partial \phi / \partial x \\ \partial \phi / \partial y \\ \partial \phi / \partial z \end{pmatrix} = \begin{pmatrix} 20 x y^3-5 y z^2 \\ 30 x^2 y^2-5 x z^2 \\ -10 x y z \end{pmatrix}\)
\(\left.\nabla \phi \right|_P=\begin{pmatrix} 0 \\ 10 \\ 20 \end{pmatrix} \rightarrow \left|\left.\nabla \phi \right|_P \right|=\sqrt{10^2+20^2}=\sqrt{500}=22.36\)
x = np.arange(-5, 5, 1)
y = np.arange(-5, 5, 1)
X, Y = np.meshgrid(x,y)
U,V = [X*Y**2,X**2*Y-4*Y]
fig, ax = plt.subplots()
q = ax.quiver(X, Y, U, V)
circle=mpl.Circle((0,0),2,facecolor='none',ec='darkred')
ax.add_patch(circle)
ax.set_aspect('equal', adjustable='box')